Drehzahlregler für einen Hafenmobilkran
Bei der Auslegung von Regelsystemen für mechanische Antriebe muss das dynamische Verhalten der Regelstrecke beachtet werden. Dies gilt insbesondere dann, wenn mehrere Antriebe in Master-Slave-Konfiguration betrieben werden. In diesem Modus bildet die Drehzahl eines Antriebes die Regelgröße, während alle Antriebe als Stellelemente dienen.
Im untersuchten Fall des Drehzahlreglers für das Drehwerk eines Hafenmobilkrans wurde zunächst das in der oberen Abbildung dargestellte FE-Modell des Mobilkrans erstellt, welches neben der Tragstruktur insbesondere auch die dynamischen Eigenschaften der Drehwerksgetriebe beinhaltet. Dieses detaillierte dynamische Modell der Regelstrecke wurde in modal reduzierter Form nach MATLAB/SIMULINK exportiert. Hier wurde der Regelkreis, ein PID-Regler mit Vorsteuerung implementiert (mittlere Abbildung).
Mit Hilfe dieses Modells des gesamten Regelkreises können nun die Reglerparameter gezielt optimiert werden. Dabei soll einerseits eine hohe Regelsteifigkeit für eine optimale Bedienbarkeit des Kranes erreicht werden. Andererseits muss ein ausreichender Sicherheitsabstand gegen Reglerinstabilitäten eingehalten werden.
Für die Stabilität des Reglers erweisen sich die mechanische Dämpfung und die Proportionalverstärkung in der Umgebung der Torsionseigenfrequenzen der Drehwerksgetriebe als entscheidende Parameter. Bei zu hoher Regelverstärkung kommt es zu einem Aufschwingen der gegenphasigen Torsionsmoden der Drehwerksgetriebe. Das untere Bild zeigt die hierbei ermittelte Stabilitätskarte des Regelkreises. Dieses Verhalten wurde in Versuchen bestätigt.
Nach Anpassung der Reglerverstärkung konnte die dynamische Stabilität des Antriebs gewährleistet werden.
Wir stehen Ihnen jederzeit mit unseren Spezialisten zur Verfügung, um flexibel auf Ihre Anforderungen und Wünsche einzugehen.
Dr. Michael Elbs, Geschäftsführer
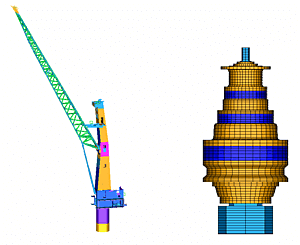
FEM-Modell des Mobilkrans (links) sowie eines Drehwerksgetriebes (rechts)
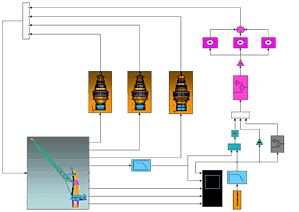
MATLAB/SIMULINK-Modell des Drehzahlreglers
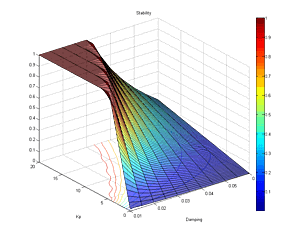
inverse Amplitudenreserve in Abhängigkeit von Proportionalverstärkung Kp und modaler Dämpfung